Los sensores de proximidad son muy variados, como los magnéticos, los capacitivos, los inductivos y los ópticos. Algunos son útiles para detectar solo metales ferrosos, mientras que otros pueden detectar cualquier tipo de metal, y otros pueden detectar cualquier tipo de objeto e incluso personas.
Muchas aplicaciones de automatización industrial requieren la capacidad de detectar la presencia y/o la posición de un objeto o persona sin establecer contacto físico a fin de evitar restringir o limitar el movimiento del objeto detectado. El sensor de proximidad es ideal para esta función.
Pero los sensores de proximidad son muy variados, como los magnéticos, los capacitivos, los inductivos y los ópticos, y la composición del material del objeto que se detecta puede afectar la capacidad de un sensor para detectar su presencia.
Algunos sensores de proximidad son útiles para detectar solo metales ferrosos, mientras que otros pueden detectar cualquier tipo de metal, y otros pueden detectar cualquier tipo de objeto e incluso personas. Los usuarios potenciales de los sensores de proximidad en una aplicación de automatización industrial deben conocer los diferentes tipos de tecnología de sensores de proximidad y su aplicabilidad en situaciones de detección específicas.
En este artículo se analizan varios tipos de sensores y se detallan los tipos de objetos que pueden detectar y la sensibilidad espacial de cada tipo de dispositivo.
Sensores de proximidad inductivos
Los sensores de proximidad inductivos detectan la presencia de objetos conductores (metálicos) y tienen un rango de detección que depende del tipo de metal detectado. Estos sensores funcionan con un campo magnético de alta frecuencia generado por una bobina en un circuito de oscilación.
Un objetivo conductor que se acerca al campo magnético presenta una inducción o corriente de Foucault inducida en él, creando un campo magnético opuesto que reduce efectivamente la inductancia del sensor inductivo.
Estos sensores de proximidad funcionan mediante dos métodos. En el primer método operativo, a medida que el objetivo se acerca al sensor, el flujo de corriente de inducción aumenta, lo que incrementa la carga en el circuito de oscilación haciendo que su oscilación se atenúe o se detenga. El sensor detecta este cambio en el estado de oscilación a través de un circuito de detección de amplitud, y emite una señal de detección.
Un esquema de funcionamiento alternativo utiliza un cambio en la frecuencia —en lugar de la amplitud— de la oscilación resultante de la presencia de un objetivo conductor. Un objetivo de metal no ferroso, como el aluminio o el cobre, que se acerca al sensor hace que la frecuencia de oscilación aumente; mientras que un objetivo de metal ferroso, como el hierro o el acero, hace que la frecuencia de oscilación disminuya.
El cambio de la frecuencia de oscilación con respecto a una frecuencia de referencia hace que el estado de salida del sensor cambie.
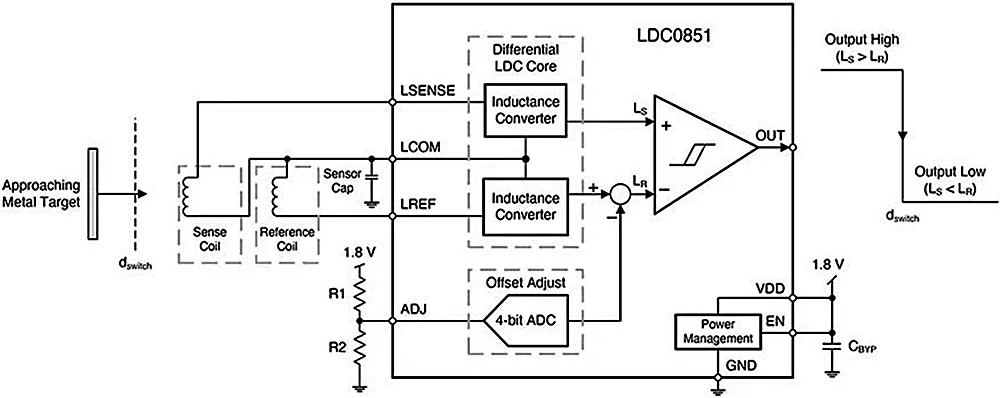
La figura 1 muestra como ejemplo el esquema de un sensor de proximidad inductivo de corto alcance que utiliza la variación de frecuencia para detectar la presencia de un objeto conductor dentro de su campo electromagnético.
El interruptor de proximidad inductivo es ideal para aplicaciones de detección de proximidad sin contacto, como la detección de presencia, el recuento de eventos y los pulsadores simples en los que el rango de detección es inferior a 10 mm. El dispositivo cambia su estado de salida cuando un objeto conductor se mueve cerca de la bobina de detección.
La implementación diferencial (bobina de detección y bomba de referencia a fin de determinar la inductancia relativa del sistema) y la histéresis se utilizan para garantizar una conmutación fiable e inmune a las vibraciones mecánicas, las variaciones de temperatura o los efectos de la humedad.
Las bobinas de captación inductiva se sintonizan con un único condensador sensor, que establece la frecuencia de oscilación en el rango de 3 a 19 MHz. La salida push-pull está en estado bajo cuando la inductancia de detección está por debajo de la inductancia de referencia y vuelve al estado alto cuando ocurre lo contrario.

Fuente de la imagen: Texas Instruments.
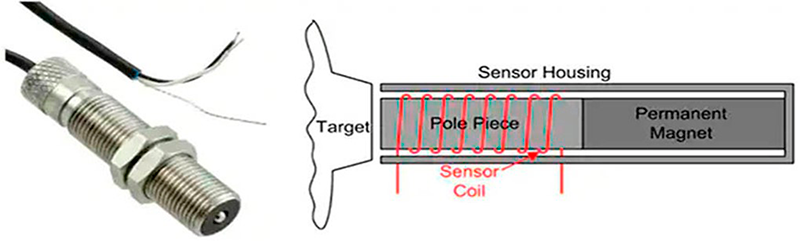
Fuentes de la imagen: Art Pini, con la imagen MP62TA00 de Red Lion Controls.

Fuente de la imagen: Red Lion Controls.
Sensores magnéticos de proximidad
Utilizados para medir la posición y la velocidad de componentes metálicos en movimiento, los detectores de proximidad magnéticos pueden ser dispositivos activos, como un sensor de efecto Hall, o pasivos, como un sensor de reluctancia variable (VR). El sensor de proximidad VR mide los cambios en la reluctancia magnética —análoga a la resistencia eléctrica en un circuito eléctrico— y consta de un imán permanente, una pieza polar y una bobina de detección encerrada en una caja cilíndrica.
Un objeto ferromagnético que pasa cerca del polo provoca una variación del campo magnético. Esta variación genera a su vez una tensión de señal en la bobina de señal. La magnitud de la tensión de la señal depende del tamaño del objeto objetivo, de su velocidad y del tamaño del hueco entre la pieza polar y el objeto. El objeto objetivo debe estar en movimiento para ser detectado por el SRV.
Los sensores de RV son dispositivos pasivos, por lo que no necesitan una fuente de alimentación y por ello suelen tener aplicación en la medición de máquinas rotativas. Por ejemplo, los captadores VR se utilizan ampliamente para detectar el paso de los dientes en un engranaje ferroso, una rueda dentada o una rueda de la correa de distribución.
También pueden utilizarse para detectar cabezas de tornillos, chavetas u otros objetivos metálicos de movimiento rápido (figura 3).
Se emplean como tacómetros para medir la velocidad de rotación y también se aplican por parejas para medir la excentricidad del eje giratorio.
El segundo tipo de sensor magnético utiliza el efecto Hall para detectar la presencia de un campo magnético. El efecto Hall describe la interacción de un conductor portador de corriente y un campo magnético perpendicular al plano del conductor. Cuando un conductor portador de corriente se coloca en un campo magnético, se genera una tensión (tensión Hall) perpendicular a la corriente y al campo. La tensión Hall es proporcional a la densidad de flujo del campo magnético y requiere un blanco que esté magnetizado.
La capacidad de detectar campos magnéticos estáticos es una de las principales ventajas del sensor de efecto Hall, ya que puede utilizarse para detectar una puerta cerrada o un objeto en una posición fija.
Sensor óptico de proximidad
Los sensores ópticos de proximidad utilizan luz —infrarroja o visible— para detectar objetos. Tienen la ventaja de que no es necesario que el objetivo sea magnético o metálico, solo tiene que obstruir o reflejar la luz. Básicamente, los sensores ópticos emiten luz y controlan la luz reflejada en el objeto objetivo (figura 5, izquierda).
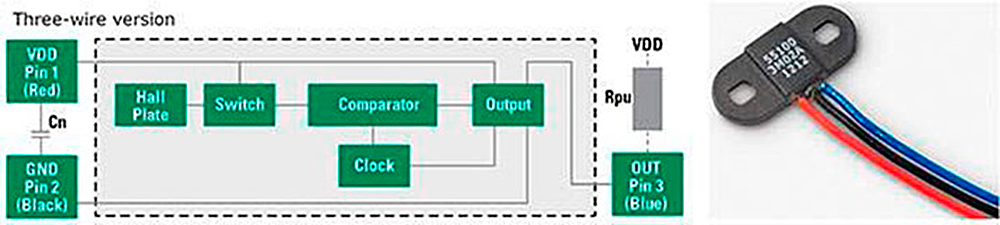
Fuente de la imagen: Littelfuse Inc.

Fuente de la imagen: Art Pini.
Fuente de la imagen: Art Pini.
Sensores de proximidad ultrasónicos
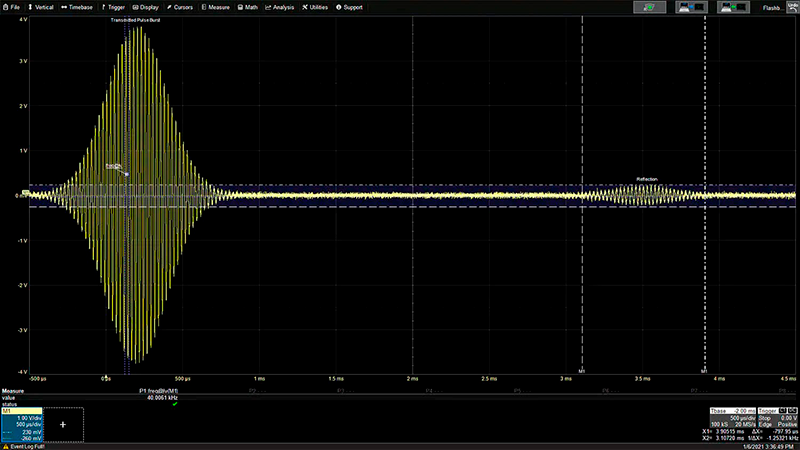
Los requisitos de distancias de detección mayores, como la detección de coches en una ventanilla de autoservicio, pueden manejarse con sensores de proximidad basados en ultrasonidos. Estos sensores detectan objetos de cualquier tipo a distancias de hasta varios metros. La base de la medición es el tiempo de vuelo de un impulso ultrasónico emitido por el transmisor del sensor que se refleja en el objeto objetivo y es captado por el receptor del sensor (figura 6).
El tiempo que transcurre desde el impulso transmitido hasta el reflejo recibido representa el tiempo de vuelo desde el sensor hasta el objeto objetivo y de vuelta. Conociendo la velocidad de propagación y el tiempo de vuelo, se puede calcular la distancia.
En el ejemplo mostrado, el tiempo de vuelo es de 3,1 ms. En el caso del aire, a 21,11 °C la velocidad del sonido es de 343,4144 m/s, por lo que la distancia total hasta el objeto y de vuelta es de 120,7008 m. El alcance del sensor al objeto es la mitad del tiempo de vuelo (o 60,3504 m).
Sensores de proximidad capacitivos
Los sensores de proximidad capacitivos pueden detectar objetivos metálicos y no metálicos en forma de polvo, granulado, líquido y sólido.
Los dispositivos son generalmente similares a los sensores inductivos, excepto que las bobinas de detección del sensor inductivo se sustituyen por una placa de detección capacitiva. Se utilizan sobre todo para detectar los niveles de líquido en los depósitos de almacenamiento.
La placa sensora del sensor forma un condensador con el objeto objetivo y la capacitancia varía con la distancia al objeto. La capacitancia de detección determina la frecuencia del oscilador, que se controla para conmutar el estado de salida cuando se cruza un umbral de frecuencia.
Fuente de la imagen: MaxBotix Inc.

Fuente de la imagen: Art Pini.
Conclusión
Los sensores de proximidad emplean múltiples tecnologías que se adaptan a diversas aplicaciones. Dependiendo del tipo de sensor, pueden detectar objetivos metálicos y no metálicos con una distancia de detección que va desde milímetros hasta cinco o más metros. Son lo suficientemente compactos como para funcionar en espacios reducidos y muchos son capaces de funcionar en entornos difíciles. Esta gama de tecnologías ofrece al usuario una gran variedad de opciones para satisfacer una gran cantidad de requisitos de detección de proximidad.
Por Arthur Pini, Consultor independiente